전남대학교(총장 지병문) 지역·바이오시스템공학과 손형일 교수팀은 5MW급 대형 해상풍력발전기의 유지보수용 로봇을 개발했다고 24일 밝혔다.[사진=전남대 제공]
이번 연구는 한국과학기술연구원(KIST 원장 이병권) 로봇연구단 이동건 연구원과 대구경북과학기술원(DGIST 총장 신성철) 로봇공학과 오세훈 교수가 참여했다.
최근 풍력발전은 설치장소 및 소음 등의 문제로 해상 쪽으로 옮겨가는 추세이고 해상풍력시스템은 대형화가 세계적인 트렌드로, 우리나라 역시 해상풍력단지 신규 조성을 통해 풍력발전 용량을 늘려가고 있다.
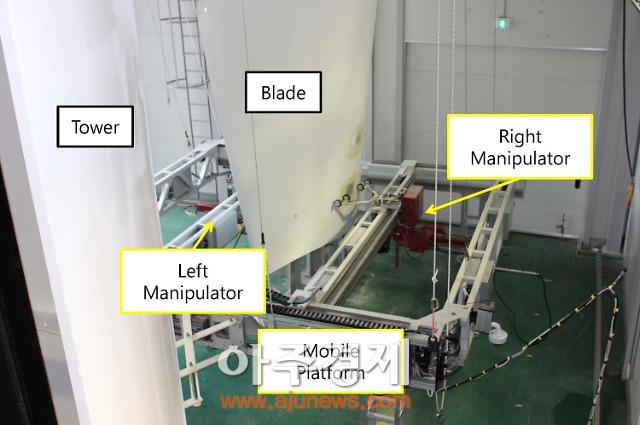
이에 연구팀은 이번 연구를 통해 날개 길이가 60m 이상인 5MW급 대형 해상풍력발전기의 유지보수작업을 자동화할 수 있는 로봇시스템을 개발했다.
연구팀이 개발한 로봇은 가로 5.2m, 세로 5.2m, 높이 0.8m 크기에 무게가 약 2톤에 달하는 초대형으로 대형 해상풍력발전기 날개 주변을 자유롭게 이동하기 위해 와이어 구동(wire-driven) 방식으로 설계됐다.
연구팀이 제안한 제어 알고리즘은 풍속 6m/s 이상의 환경에서도 와이어 구동 로봇의 자세 및 위치를 정밀하고 강인하게 제어할 수 있어 자동 유지보수 작업에 적합함이 입증됐다.
산업통산자원부 산업핵심기술개발사업, 한국연구재단 등의 지원을 받아 이뤄진 이번 연구 성과는 최근 스웨덴 스톡홀롬에서 개최된 세계 최고 권위의 국제전기전자공학회(IEEE) 주최 로봇 컨퍼런스(International Conference on Robotics and Automation)에 발표됐다. 또 국제전기전자공학회(IEEE)와 미국기계학회(ASME)가 공동으로 발간하는 기계 및 제조 분야 최고 권위의 국제 학술지 ‘IEEE/ASME Transactions on Mechatronics’(JCR 상위 2.5%)에 게제될 예정이다.
연구책임자인 손형일 교수는 인간중심 로봇 및 자동화 연구실을 이끌며 원격제어 및 햅틱 기술을 기반으로 농업, 항공, 원자력발전소 등을 대상으로 하는 다양한 원격로봇시스템을 연구하고 있다.
손 교수는 2015년 3월 전남대 농업생명과학대학 생물산업기계공학전공 전임교원으로 임용된 이후 한국연구재단, 산업통산자원부, 농림축산식품부 등의 과제책임자로 활발한 연구활동을 하고 있다.








![[포토] 군사법원, 박정훈 대령 무죄 선고](https://image.ajunews.com/content/image/2025/01/09/20250109104729509983_518_323.jpg)
![[포토] 공수처장, 2차 체포영장 집행이 마지막이란 각오](https://image.ajunews.com/content/image/2025/01/08/20250108002008900920_518_323.jpg)
![[포토] 눈 내리는 제주항공 사고 현장](https://image.ajunews.com/content/image/2025/01/07/20250107105645774286_518_323.jpg)
![[포토] 개막 앞둔 CES 2025](https://image.ajunews.com/content/image/2025/01/06/20250106203539844914_518_323.jpg)


