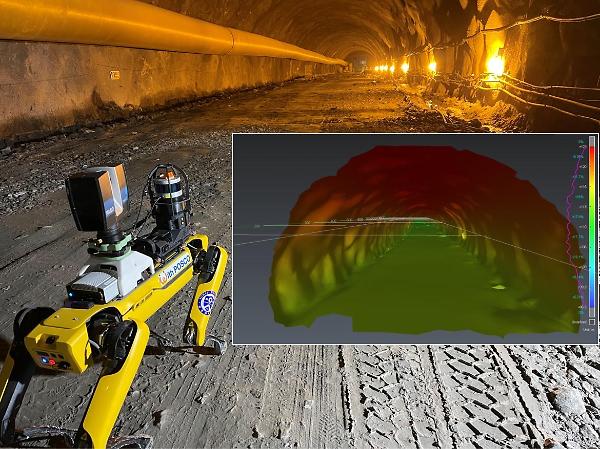
포스코건설이 최근 국내 최초로 ‘포천~화도 고속도로 4공구’ 터널공사에 고성능 측정장비를 탑재한 자율보행 로봇을 적용해 시공 안전·품질 관리에 나서고 있다. [사진=포스코건설 제공]
포스코건설이 터널공사에 무인으로 작동하는 자율보행 로봇을 이용해 안전·품질 관리에 나선다고 13일 밝혔다.
포스코건설은 최근 자율보행 로봇에 레이저로 지형을 측정하는 라이다와 고성능 카메라를 탑재해 터널 내부의 시공오류, 균열 등을 확인하기로 결정했다.
로봇을 이용하게 되면서 발파 작업 직후 인력이 투입되기 전에 낙하위험이 있는 암반 등의 위험요소를 사전에 확인해 사고를 미연에 방지할 수 있을 것으로 기대된다.
포스코건설은 최근 '포천~화도 고속도로 4공구' 현장의 터널공사에 자율보행 로봇을 시범 적용해 그 효과를 입증한 바 있다.
포스코건설은 이와 함께 라이다를 탑재한 드론으로 스캔한 정보를 바탕으로 지형·토공량 등의 사업부지 정보를 제공하는 '포스 사이트' 시스템을 개발해 정밀설계와 시공오류를 확인하는데 활용하고 있다. 측량 작업자 없이 경사면을 굴착하고 매설물이 있는 토지의 정밀한 굴착이 가능하도록 각종 계측기를 부착한 굴삭기를 투입하는 등 스마트컨스트럭션 기술을 현장에 적극 적용 중이다.
포스코건설 관계자는 "현장에서 근무하는 작업자들의 안전을 지키고 현장 작업의 효율성 제고를 위해 스마트컨스트럭션 기술을 적극 도입하고 있다"며 "모든 공사에 스마트컨스트럭션 기술을 적용해 안전하고 일하기 편리한 일터를 만들어 ESG경영을 적극 실천해 나가겠다"고 말했다.








![[날씨] 크리스마스 낮부터 추위 주춤…밤부터 눈·비](https://image.ajunews.com/content/image/2024/12/24/20241224173627873669_388_136.jpg)
![[포토] 윤대통령, 2차 출석요구 불응…공수처 오늘은 기다려볼 것](https://image.ajunews.com/content/image/2024/12/25/20241225120851969194_518_323.jpg)
![[포토] 어지러운 세상, 잠시만 잊고 메리크리스마스](https://image.ajunews.com/content/image/2024/12/24/20241224205253484194_518_323.jpg)
![[포토] 2025 아주경제 미래 전망 총장 포럼](https://image.ajunews.com/content/image/2024/12/23/20241223204826600972_518_323.jpg)
![[슬라이드 포토] 2024 SBS 연기대상 레드카펫을 빛낸 배우들](https://image.ajunews.com/content/image/2024/12/21/20241221223535311348_518_323.jpg)


